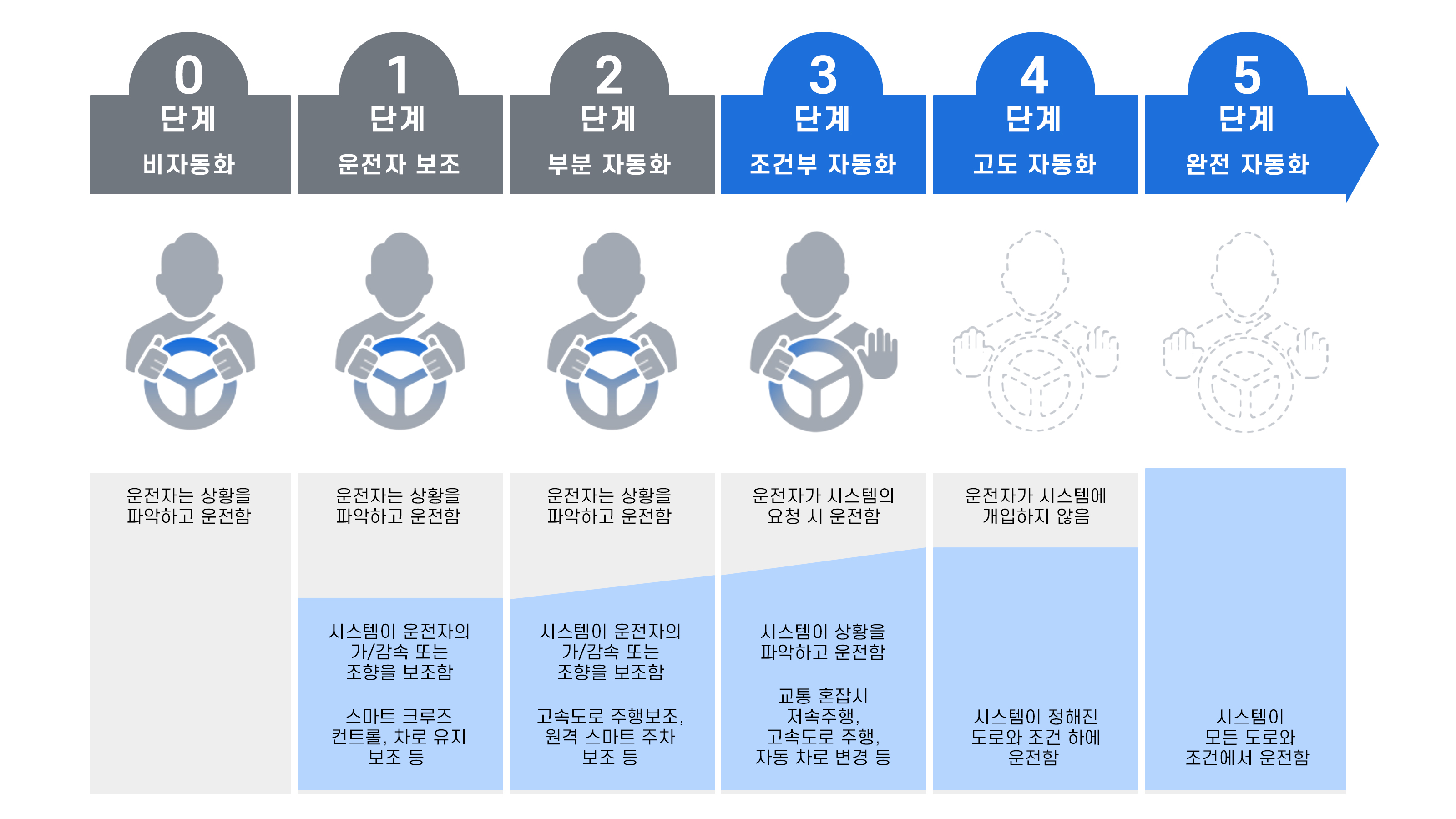
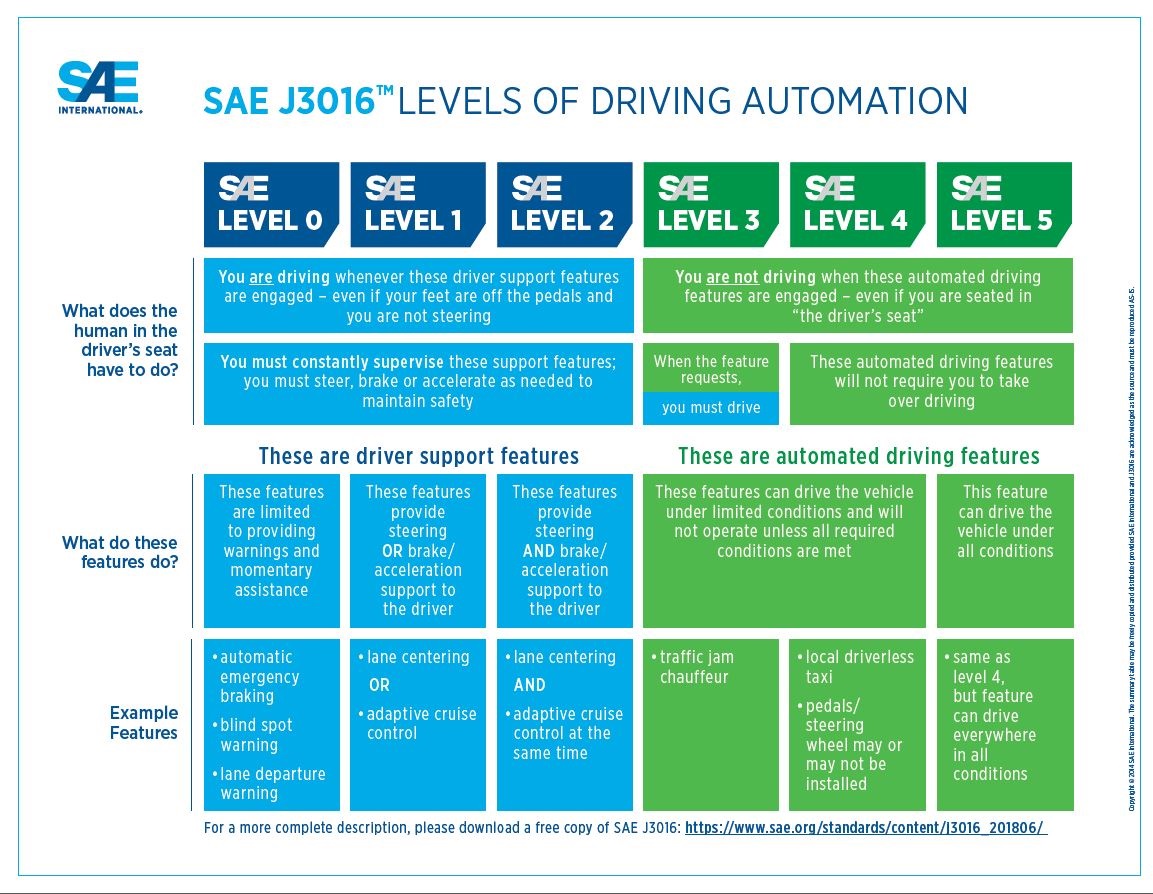
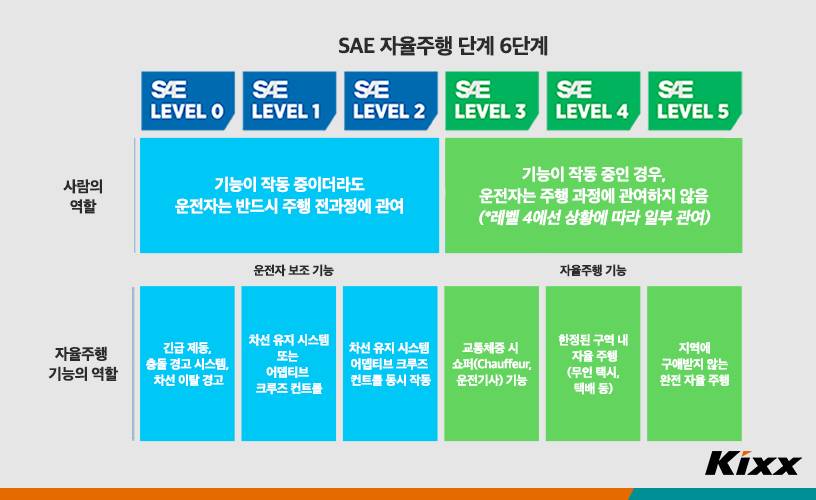
1. 서론-자율주행기술레벨6-국제자동차기술자협회(Society of Automotive Engineers:SAE)에서 자율주행기술레벨을 6단계로 세분화

1. 서론-자율주행기술레벨6-국제자동차기술자협회(Society of Automotive Engineers:SAE)에서 자율주행기술레벨을 6단계로 세분화
B. 지능형 운전 지원 시스템(Advanced Driver Assistance System:ADAS)-자동 운전의 기반이 되고, 감지 센서와 GPS, 통신, 지능형 장비 등을 이용하여 주행 중에 자동차가 스스로 주변 환경을 인식하는 판단을 내리도록 하는 시스템-ADAS센서 결합 정도로 분류되고 ADAS는 인지·판단·제어의 총 3단계로 구성 1)인지 단계-센서로부터 데이터를 수집하는 단계-Radar·LiDAR, Camera등의 인지 센서로부터 외부 환경의 정보를 수집하고 가공 2)판단 단계-인지 시스템으로 수집된 정보를 통해서 상황에 대한 적절한 경로와 움직임을 결정하는 단계-자동차의 사각 지대로 환경 영향으로 발생할 수 있는 인지 오류를 보완하기 위해서 실시간 도로 환경 정보를 제공하는 정밀 지도와 다른 자동차 정보가 분가볍게 Vehicle to Everything(V2X)통신 정보를 융합시키고 정확한 주행 정보를 계산 3)제어 단계-판단 단계에서 내린 결정을 실제로 구현하거나 액튜에이터 등을 통해서 직접 제어한다.자동 운전 자동차의 센서를 대상으로 한 여러 취약성 분석 발표-자동 운전 기술은 교통 사고 감소, 드라이버의 편리성 향상 등의 긍정적인 요소가 존재하지만 자동 운전 자동차에 대한 사이버 공격 가능성이 존재-자동 운전 자동차의 주행 상황 인지 과정에서 치명적인 오류를 발생시킬 수 있으며, 이로 인한 인명 피해와 경제적 피해가 발생할 가능성 2.Radar센서 공격자.개념-자동차에 자동 긴급 제동 제동 기능과 차선 유지 기능을 지원하기 위해서 사용한다.원리-전자파를 방출하고 수신하는 기본 원리로 작동하고 Time-of-Flight시간을 측정하고 장애물과의 거리를 측정한다.공격-재밍(Jamming)공격 및 스푸핑(Spoofing)공격 1)레이더 센서에 대한 재밍 공격-재밍 공격은 레이더 센서를 통해서 탐지된 물체를 Tesla Autopilot시스템에서 사라질 가능성이 있다-재밍 공격을 수행하기 위해서 레이더 센서가 발생하는 같은 주파수 내 76~77GHz(Tesla기준)을 생성하고 공격을 수행 2)레이더 센서에 대한 스푸핑 공격-주변에 존재하는 장애물과 측정 거리를 변조-레이저 센서에서 발생하는 비슷한 무선 신호를 이용하고 스푸핑 공격을 한다.LiDAR기반 인식에 대한 적대적 센서 공격-단순 신호 스푸핑 공격으로 물건 인식 자리를 더욱 멀게 또는 더 가까이 판단하도록 유도-적대적 모델(Adversarial Example)생성 방법을 이용한 공격에서 가짜 장애물(fakeobject)을 통해서 실험 자동차의 비상 브레이크를 작동시키는 공격이나.카메라와 LiDAR에 보이지 않는 사례-임의의 센서에 대한 에러 주입 공격에 대응하기 위한 복수의 센서 값을 동시에 활용하고 자동차 주변의 도로 상황을 인지하는 센서 퓨전 기술이 자동차에 적용-카메라 센서와 LiDAR센서를 사용하고 기물을 인지하는 센서 퓨전 기술에 대한 공격 4.Vision(Camera)센서 공격이.ADAS의 팬텀-탑재된 카메라 센서에 의해서 탐지된 물체가 실제 이미지인가 빛으로 투영된 가짜 이미지(Phantom)인지 분류할 수 없는 문제-휴대용 프로젝터를 통해서 팬텀으로 불리는 홀로그램 이미지와 가짜 교통 표지판을 테슬라 자동차에 투영한다.안전성의 문제 발견-차로 탐지 모듈이 차선을 잘못 인식하게 가짜 차선을 생성하는 공격이다.더티 로드 공격 가능(Dirty Road Can Attack)-Automated Lane Centering(ALC)시스템에 오작동을 유발하는 공격[참고]자동 운전 자동차의 센서 공격 모델
인기글

![[산업 공부] 자율주행 공부](https://live.lge.co.kr/wp-content/uploads/2021/09/car_cloud_05_210826.jpg "[산업 공부] 자율주행 공부")
![[미국주식] 테슬라 FSD 자율주행 중국 도입 청신호 : 중국 자동차 데이터 안전검사 적합판정](https://www.hellot.net/data/photos/20230417/art_16824111210169_1b8be8.jpg "[미국주식] 테슬라 FSD 자율주행 중국 도입 청신호 : 중국 자동차 데이터 안전검사 적합판정")